쿼드콥터 프로젝트 2013-winter 데모영상
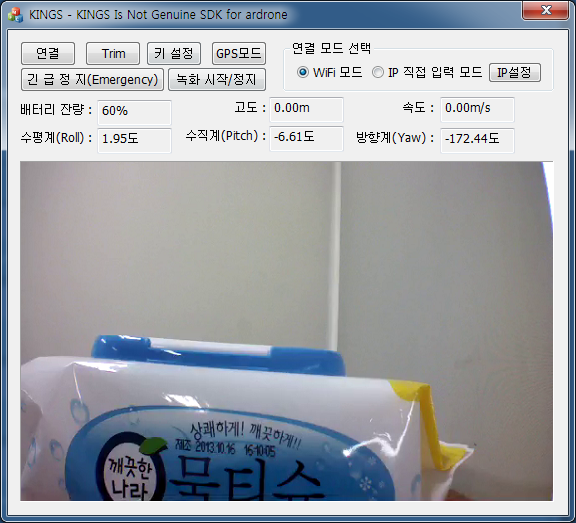
AR Drone 이라는 프랑스 쿼드콥터 키트를 활용해서 프로젝트를 진행합니다.
이 쿼드콥터는 전면 카메라(1280*720*30) 촬영용과 하단 카메라(패턴인식을 이용한 자리유지)를 사용합니다.
이번 프로젝트를 통해서 Windows OS에서 키트제어 및 센서값을 읽어오는 것을 하였습니다.
겨울 방학기간을 활용하여 LTE 통신으로 제어하도록 수정하겠습니다.
다음 학기때는 Image processing을 통해 차영상을 활용한 물체 추적(Object tracking) 프로젝트를 할 것 같습니다.